
Overview of Haptic Actuators
Haptic feedback has come a long way over the last few decades, from pagers to the iPhone’s taptic engine, but the hardware is still a limiting factor for the possibilities. Here at PIEZO.com, we have done a lot of research and development with piezoelectric (piezo for short) actuators to improve the hardware and open new avenues for haptic feedback. In this post, we discuss: the differences between piezo actuators, and the more traditional haptic actuators: eccentric rotating mass (ERM) motors, and linear resonant actuators (LRA).
These devices, also called tactors, short for “tactile actuators," create motion that allow electronic devices to impart information to the user through their sense of touch. Here we will focus on tactile and vibrotactile feedback, which is felt in the skin, which is what these actuators are made for, but it is worth noting that the term haptics has come to encompass many other areas, like kinesthetic feedback felt by larger movements of limbs. We will look at the key performance parameters, the mechanisms behind the devices, and finally look at some examples of commercially available products.
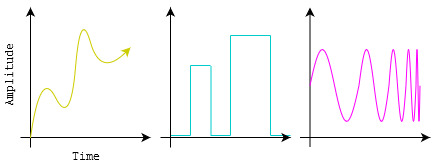
There are a lot of quantitative criteria you can use to evaluate haptic actuators, but the most important is performance. Performance is all about the motion that a tactor can produce, and for that there are two main criteria. First is amplitude, which is the essentially the strength of motion and can be measured as acceleration (in g’s), force (in Newtons), or deflection (e.g. in mm). Second is speed of the motion, measured as response time (in seconds) or frequency (in Hertz) for periodic signals.
Background
To get a good feel for their performance, it helps to understand the qualitative differences between these actuators, so let’s look at how these actuators generate motion.
ERM and LRA use magnetic properties to either spin a mass or push it up and down. These are the same type of actuators used in electric motors and speaker voice-coils that are common in modern appliances. ERM actuators produce motion across two axes, whereas LRA actuators create motion in a single axis.
In contrast, piezoelectric actuators generate motion through the piezoelectric effect, a property that causes the material to squeeze or stretch when an electric signal is applied. For haptics, the most common configurations piezoelectrics are the bender and the stack. Both types produce motion in a single axis, but benders have much more displacement. For more information on stack type actuators, check out TDK.
Piezoelectric Benders
These actuators consist of two pieces of piezoelectric material mounted in a cantilever beam configuration (think: diving board). When a voltage signal is applied, the beam bends, creating significant motion at the tip of the beam – hence the term bender. This bending motion is the strength, and in this case also called deflection or displacement, represented as ∆Xout in Figure 1, which corresponds to the amount of force produced by the actuator, Fout. The typical base material for piezoelectric actuators is a class of ceramics called PZT, which are brittle in their raw form. PIEZO.com has several proprietary bonding technics that protect the ceramic element from cracking and insulate the electrically conductive surfaces.

A major advantage of these actuators is their fast response time, typically on the order of 1ms. The deflection of the actuator is directly proportional to the control signal, so it can be set and held at a position, or made to vibrate. Unlike ERM and LRA, both the position/amplitude and the frequency of deflection can be controlled independently, so it is possible to create much more complex and detailed signals. This lets a system convey a lot more information than with ERM and LRA. For example, reproducing the heartbeat of a patient for a doctor or the clanking of a water pipe for a plumber.
One downside to piezos is that the driving signal needs to be at a relatively high voltage, compared to ERM and LRA, up to about 200V. Fortunately, there are some commercially available “piezo driver” integrated circuits that can generate this voltage from a low voltage source (3.3V to 5V), such as the DRV8662 from Texas Instruments, and the more recent and highly efficient BOS1901 chip from Boreas Technology. The current consumption of piezos is much lower, so overall, they take less power than other actuators for similar types of output. The power efficiency of the driver chip is a big factor in the total power consumption, which is typically on the order of 0.1 to 1W average during use. Because of the wide range of speed and amplitude that piezo benders have, they can operate effectively at the lower end of the power range.
The complexity of the driving circuit has long been a barrier for piezos, which PIEZO.com has been working on for years. To make piezo actuators more accessible, we created a piezo actuator development kit that integrates the driving circuits into a single package. The actuator units in this kit are designed for rapid development into smart garments, complete with software.
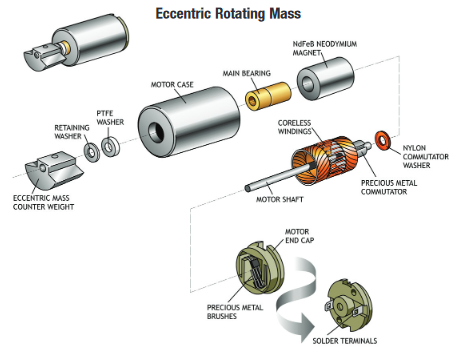
ERM – Eccentric Rotating Mass
These magnetic motors spin an unbalanced mass to create vibrations. They typically come in two form factors: coin and cylinder. These are the oldest and most commercially mature technology and they come in a range of power and performance specs. Due to the inertia of the mass, an ERM is slow to startup and shutdown, in the range of 50 to 100ms. The amplitude (strength) of the output is also determined by the frequency (speed) of the motor. This makes it difficult to produce complex and subtle waveforms.
Pros: Mature technology; widely available; simple to use; low cost
Cons: Higher power consumption; slow start-up; amplitude depends on frequency
LRA – Linear Resonant Actuators
These actuators consist of a magnetic coil that pushes a mass up and down to create vibrations, enhanced by a spring. LRAs come in similar form factors to ERMs, and the linear motion they create gives the LRA a more directed and cleaner-feeling output than ERMs. However, the resonance mechanism only operates over a narrow frequency range, but the amplitude is more flexible. The driving voltage is low, typically 2V, which is easy to control with standard components.
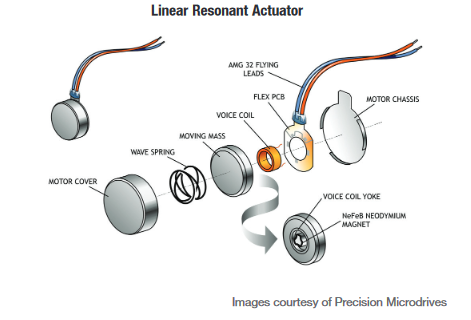
For more information on ERM and LRA, check out Precision Microdrives.
Comparing Performance
In terms of speed and frequency, piezo is the clear winner, and LRA a respectable second place. Both have a fast start up time, but LRA is more limited in frequency and typically only able to operate over a narrow range such as 170 to 180 Hz due to sharp resonance peak. While piezo also has a resonance peak, it can operate effectively over a much wider frequency range, from 0 Hz up to around 500 Hz.
For amplitude, the scores are much closer, and all three are in the same ballpark. For ERM and LRA, amplitude is most often given as acceleration, which depends heavily on the mass of the system, i.e. everything the actuator is touching. Acceleration also depends on other factors like damping and boundary conditions – is the actuator tightly squeezed in a fist, or dangling on a string? Because of these complications, we typically use tip displacement instead of acceleration to measure the amplitude of piezos.
In order to get an acceleration measurement for an apples-to-apples comparison, I set up a test with the our smart tactor piezo actuator by attaching a lightweight accelerometer to the tip of the piezo. The mass of the accelerometer was 1.1 grams, and the resulting acceleration measurements were in the hundreds of g’s range. Looking around, I found that Precision Microdrives had tested their actuators with a mass of 100 grams, so I calculated the force on the piezo, and the equivalent acceleration that would be felt by a 100 gram mass. The chart below shows the acceleration, across a range of frequencies, at full amplitude and half amplitude. With a maximum of 3.5 g’s, the piezo is as good or better than most standard LRA and ERM.
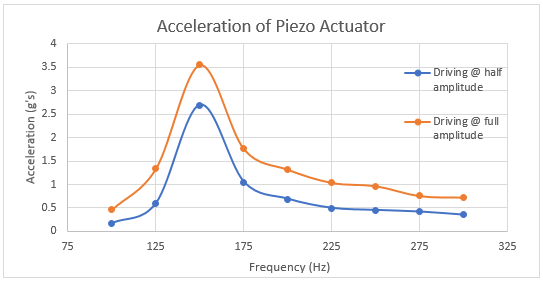
Figure 6: Acceleration vs. Frequency
Product Comparison Chart
To wrap up, here is a chart with some examples of actuators of different types. There are many more nuances to haptic actuators, so please contact us with any remaining questions. In addition to the smart tactor development kit, we do sell standalone piezo benders, with a range of different characteristics suitable for many applications.
| Part Name | SPS-100 | 1313H018V120 | 308-100 | LV081230B-L30 |
| Manufacturer | Piezo.com | TDK | Precision Microdrives | Jinlong Machinery & Electronics |
| Actuator Type | Piezo Bender | Piezo Stack | ERM, coin | LRA |
| Max Driving Voltage | 5VDC, 190V internal | 120V | 3V | 2VAC |
| Power Rating | 1.1W, max | Varies | 0.21W, typical | 0.23W, typical |
| Acceleration Amplitude | 3.5 G, pk-pk | 13 G, pk-pk | 0.7 G, typical | 0.8 G, RMS |
| Displacement Amplitude | 3.93mm | 0.06mm | Not Given | Not Given |
| Peak Frequency | 300 Hz | 32kHz | 200 Hz | 175 Hz |
| Cost | $650 | $62.27 |
£5.05 |
$7.65 |
| Link | Product Page | Product Page | Product Page | Product Page |
I hope you've found this post helpful in comparing piezo to ERM and LRA. If you have any questions, please don't hesitate to contact us or leave a comment below. And if you liked this post, feel free to subscribe to our blog for a once a month email with all our latest posts.
Related Posts:
- Four Steps to Selecting a Piezoelectric Energy Harvesting Device
- How to Drive Piezoelectric Actuators
- Synthetic Jets: Basic Principles

Sources
- “Haptics Technology: Picking Up Good Vibrations” - EE Times
- “Eccentric Rotating Mass Vibration Motors – ERMS” - Precision Microdrives
- “Mechanical Tear Down Coin Vibration Motor” - Jinlong Machinery & Electronics
- “High-Definition Haptics: Feel the Difference!” - Texas Instruments